
The following components are required for this lesson.
| Components |
|---|
| Arduino Board |
| ADXL335 Accelerometer sensor |
| Breadboard |
| Breadboard wire links |
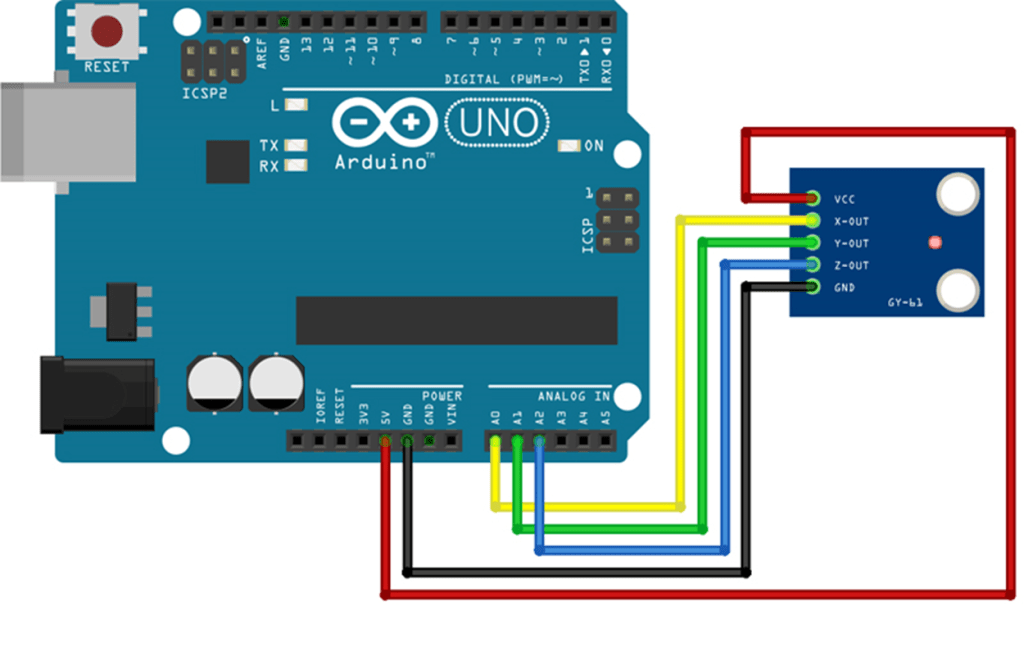
Arduino – Accelerometer Sensor Wiring Diagram
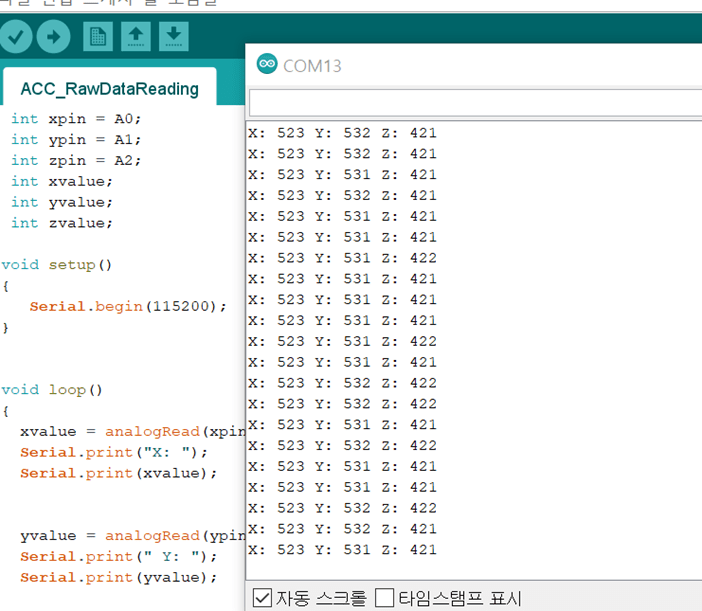
Accelerometer Sensor Reading Code in Arduino
int xpin = A0;
int ypin = A1;
int zpin = A2;
int xvalue;
int yvalue;
int zvalue;
void setup()
{
Serial.begin(115200); // initialize the serial communications:
}
void loop()
{
xvalue = analogRead(xpin);
//reads values from x-pin & measures acceleration in X direction
Serial.print("X: ");
Serial.print(xvalue);
yvalue = analogRead(ypin);
Serial.print(" Y: ");
Serial.print(yvalue);
zvalue = analogRead(zpin);
Serial.print(" Z: ");
Serial.print(zvalue);
Serial.println();
delay(100);
}
Output:
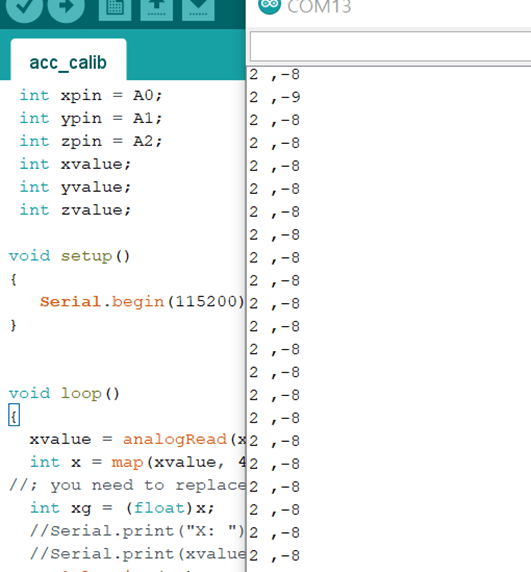
Accelerometer Sensor G value Reading for Game Application
int xpin = A0;
int ypin = A1;
int zpin = A2;
int xvalue;
int yvalue;
int zvalue;
void setup()
{
Serial.begin(115200); // initialize the serial communications:
}
void loop()
{
xvalue = analogRead(xpin); //reads values from x-pin & measures acceleration in X direction
int x = map(xvalue, 400, 600, -10, 10); //maps the extreme ends analog values from -100 to 100 for our understanding
//; you need to replace the 267 & 400 value with your values from calibration
int xg = (float)x; //converts the mapped value into acceleration in terms of "g"
//Serial.print("X: ");
//Serial.print(xvalue);
Serial.print(xg); //prints value of acceleration in X direction
Serial.print(" ,");
// Serial.print("g "); //prints "g"
// yvalue = analogRead(ypin);
// int y = map(yvalue, 400, 400, -100, 100);
// float yg = (float)y/(-10);
// Serial.print(" Y: ");
// Serial.print(yvalue);
//Serial.print(" ,");
// Serial.print("\t");
// Serial.print(yg);
// Serial.print("g ");
zvalue = analogRead(zpin);
int z = map(zvalue,400, 600, -10, 10);
int zg = (float)z;
// Serial.print("\t");
//Serial.print(" Z: ");
//Serial.print(zvalue);
// Serial.println();
Serial.println(zg);
// Serial.println("g ");
delay(100);
}
Output:
Ball Control Game in Python Pygame
import serial # import Serial Library
import numpy # Import numpy
import pygame
import sys
arduinoData = serial.Serial('COM13', 115200) # Creating our serial object named arduinoData
SCREEN_WIDTH = 640
SCREEN_HEIGHT = 480
white = (255, 255, 255)
black = (0, 0, 0)
pos_x = 200
pos_y = 200
color1 = (192, 192, 192)
color2 = (153, 0, 0)
pygame.init()
pygame.display.set_caption("Game by Osman Gul")
screen = pygame.display.set_mode((SCREEN_WIDTH, SCREEN_HEIGHT))
clock = pygame.time.Clock()
while True: # While loop that loops forever
while (arduinoData.inWaiting() == 0): # Wait here until there is data
pass # do nothing
arduinoString = arduinoData.readline() # read the line of text from the serial port
arduinoString = arduinoString.decode('UTF-8').strip()
dataArray = arduinoString.split(',') # Split it into an array called dataArray
print(dataArray)
x = int(dataArray[0].strip())
z = int(dataArray[1].strip())
clock.tick()
for event in pygame.event.get():
if event.type == pygame.QUIT:
sys.exit()
if z>0:
pos_x += 5
if z < 0:
pos_x -= 5
if x > 0:
pos_y += 5
if x < 0:
pos_y -= 5
screen.fill(color1)
pygame.draw.circle(screen, color2, (pos_x, pos_y), 20)
pygame.display.update()
Output:
Ping-Pong Game with Accelerometer Sensor Code in Python Pygame
import pygame
import random
import serial
arduinoData = serial.Serial('COM13', 115200)
# Initialize Pygame
pygame.init()
pygame.display.set_caption("Accelerometer Game by Osman Gul")
# Set the screen size
screen_width = 400
screen_height = 400
screen = pygame.display.set_mode((screen_width, screen_height))
# Set the game clock
clock = pygame.time.Clock()
# Set the colors
BLACK = (0, 0, 0)
WHITE = (255, 255, 255)
# Set the font
font = pygame.font.SysFont('Arial', 30)
# Set the ball properties
ball_pos = [screen_width // 2, screen_height // 2]
ball_radius = 10
ball_speed = [5, 5]
# Set the paddle properties
paddle_width = 100
paddle_height = 10
paddle_speed = 5
paddle_pos = [(screen_width - paddle_width) // 2, screen_height - paddle_height]
# Set the score
score = 0
# Main game loop
running = True
while running:
while (arduinoData.inWaiting() == 0): # Wait here until there is data
pass # do nothing
arduinoString = arduinoData.readline() # read the line of text from the serial port
arduinoString = arduinoString.decode('UTF-8').strip()
data = int(arduinoString)
#print(data)
#data = ser.readline().decode().strip()
# Handle events
for event in pygame.event.get():
if event.type == pygame.QUIT:
running = False
# Move the paddle
if data< 0:
paddle_pos[0] -= paddle_speed
if data> 0:
paddle_pos[0] += paddle_speed
# Move the ball
ball_pos[0] += ball_speed[0]
ball_pos[1] += ball_speed[1]
# Check for ball collision with the walls
if ball_pos[0] <= ball_radius or ball_pos[0] >= screen_width - ball_radius:
ball_speed[0] = -ball_speed[0]
if ball_pos[1] <= ball_radius:
ball_speed[1] = -ball_speed[1]
# Check for ball collision with the paddle
if ball_pos[1] >= paddle_pos[1] - ball_radius and paddle_pos[0] <= ball_pos[0] <= paddle_pos[0] + paddle_width:
ball_speed[1] = -ball_speed[1]
score += 1
# Check for game over
if ball_pos[1] >= screen_height:
running = False
# Draw the game objects
screen.fill(BLACK)
pygame.draw.circle(screen, WHITE, ball_pos, ball_radius)
pygame.draw.rect(screen, WHITE, (paddle_pos[0], paddle_pos[1], paddle_width, paddle_height))
score_text = font.render('Score: ' + str(score), True, WHITE)
screen.blit(score_text, (20, 20))
#print(data)
# Update the screen
pygame.display.flip()
# Set the game speed
clock.tick(60)
print("Score =", score)
# Quit Pygame
pygame.quit()
Ping-Pong Game with Accelerometer Sensor

Leave a comment